Dobb·E
About Dobb·E
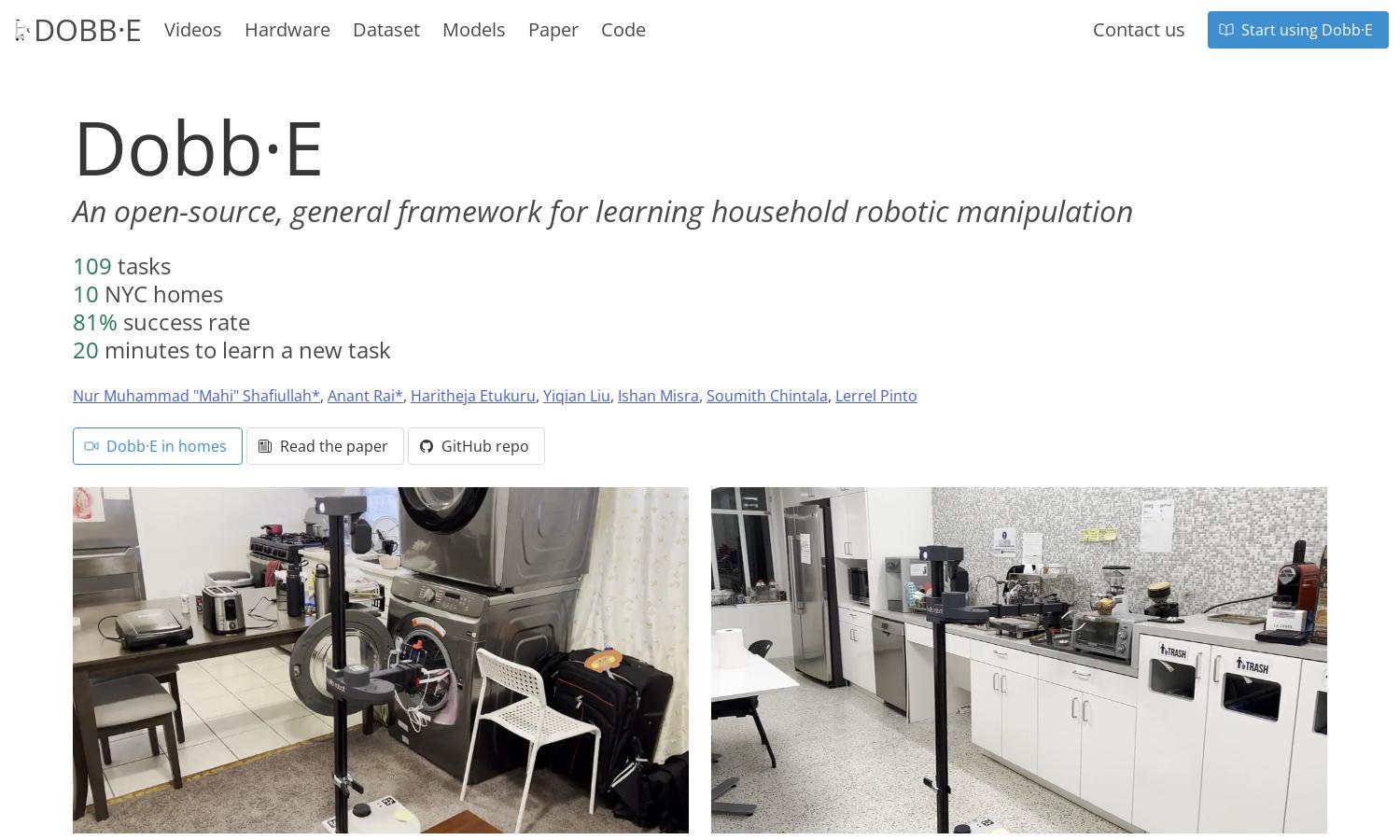
Dobb·E revolutionizes home robotics by enabling efficient task learning within 20 minutes. This open-source framework leverages simple tools and collected user demonstrations to train robots using imitation learning. With an 81% success rate across 109 tasks, Dobb·E aims to reshape domestic assistance in households globally.
Dobb·E offers a free, open-source platform for individuals and organizations. Users can access its tools and datasets without any subscription fees. As more users experiment and contribute to Dobb·E, the platform's capabilities expand, making it an invaluable resource for advancing home robotics.
Dobb·E's user interface is intuitive and designed for seamless navigation, allowing users to access features easily. The layout prioritizes user-friendliness, facilitating quick interactions and access to resources like tutorials and datasets, empowering users to effectively utilize Dobb·E for robotic learning.
How Dobb·E works
Users start with Dobb·E by accessing the online platform, where they can find tutorials and documentation for setup. After onboarding, they utilize "The Stick" to demonstrate household tasks for five minutes. The platform processes the demonstration, trains the robot, and enables it to adapt to new environments within 15 minutes.
Key Features for Dobb·E
Imitation Learning
Imitation learning in Dobb·E sets it apart, enabling robots to learn household tasks rapidly. Users showcase tasks using "The Stick", and within 20 minutes, the robot adapts to new challenges. This efficient approach not only streamlines training but also enhances the overall functionality of home robotics.
Homes of New York Dataset
The Homes of New York (HoNY) dataset is a cornerstone feature of Dobb·E. It comprises 13 hours of interaction data from 22 homes, providing a rich resource for training models. This dataset elevates Dobb·E's capabilities, fostering a deeper understanding of diverse household environments and tasks.
Home Pretrained Representations
Home Pretrained Representations (HPR) are key to Dobb·E's performance. This deep learning model, trained on extensive household interaction data, allows robots to generalize across tasks efficiently. HPR enhances the adaptability of robots, making them effective at performing new tasks in various home settings quickly.